Camera Calibration
Horizons requires information about the hardware producing video data in order to provide accurate measurements and project capability of uploaded video content. You will need to know the position and orientation of cameras relative to the survey vehicle’s GPS Unit as well as details of the camera specifications. Coordinates given in the Video Synchronization File are assumed to be those of the GPS Unit within the survey vehicle.
The following information must be provided (in any format) in order to satisfy the requirements for camera calibration:
Camera ID
The Camera ID is a 1-based number used to identify the camera.
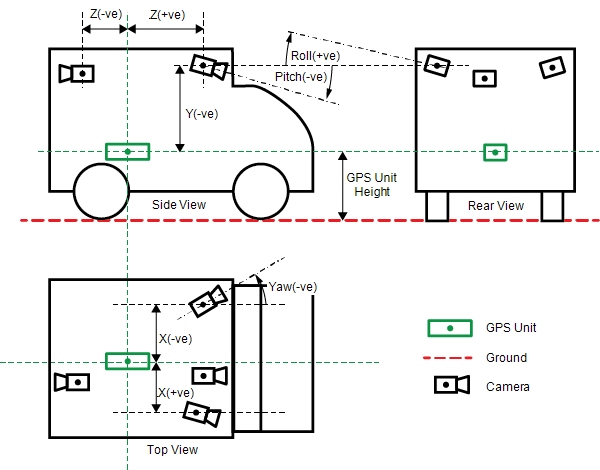
Camera Extrinsics (Position and Orientation)
X
Position of camera relative to lengthwise centreline of the GPS Unit, +ve to the right (offside), –ve to the left (nearside) (meters)
Y
Position of camera above the GPS Unit (metres) –ve means higher than the unit.
Z
Position of camera relative to crosswise centreline of the GPS Unit, +ve means in front of the unit (towards front of vehicle), -ve means behind (metres)
Pitch
The pitch of each camera relative to horizontal. –ve means pointing down towards the ground, +ve means pointing up (degrees).
Roll
The roll of the camera, +ve clockwise with the camera facing away from the viewer and 0’ means level (degrees).
Yaw
The heading of the camera relative to the GPS Unit’s “forward” direction (i.e. relative to the lengthwise centerline of the unit) (degrees).